Hi everyone 
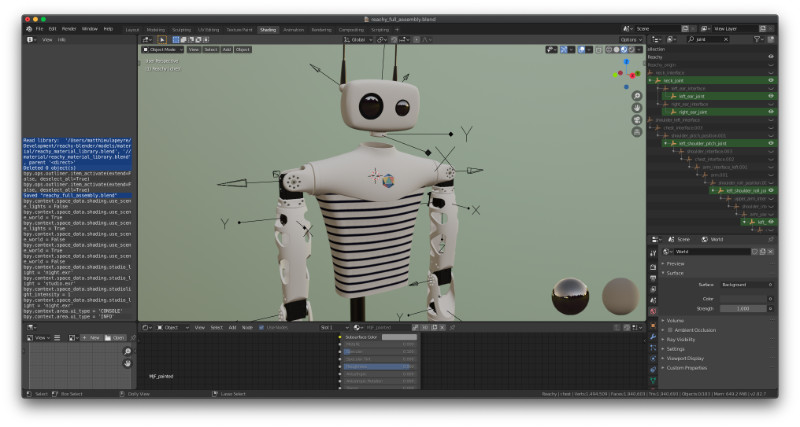
To build our 3D simulator we have created a blender model of Reachy.
We’ve decided to release our models under Creatives Commons to allow anyone to have fun with a virtual Reachy!
You can read the complete blog post here:
https://medium.com/pollen-robotics/we-are-releasing-reachys-models-for-creative-people-befe45b437fb
And get the files on the Github repository:
To start even faster, in the following file you can find the Reachy’s postures I made for my shitty photoshop work.
reachy_images.zip (1.8 MB)
1 Like
could the reachy be printed to look like a nextage robot? Just for aesthetics but Im also interested in additional degrees of freedom and range of motion beyond human capability when the reachy is being used autonomously and not under human remote control. This was one of the drawbacks of a universal robot arm, using remote control wouldn’t be using its full potential. I’m hoping to develop some kind of translation program to translate human motion capture to robot and eventually get back better information to use my body to its full potential.
Hey I would like to start experimenting with Virtual Reality controls in a simulated environment modeled after my workplace to see how the reachy would perform basic tasks and actions and physical movements and maneuvers that are part of my daily routine at work. I also think this will hold value for future training of neural a networks. I have access to a oculus quest is this currently possible?