Hello,
first of all I want to say that Reachy is beautiful both aesthetically and from the engineering point of view and I am happy to become a part of this community
I’m creating a similar system by myself, however I’m only focusing on head part and I’m curious what quality you have achieved in field of video streaming. Could you share some parameters? What is the resolution, fov of the cameras and latency of the stream? And most importantly - is it enough for comfortable use?
Hi @Lukk,
Sorry about the late answer and thanks for your message
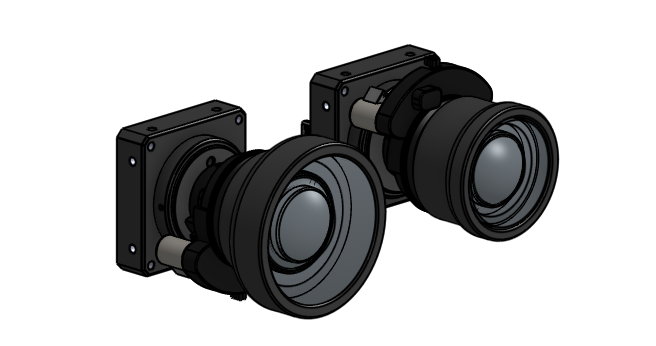
We’re using these cameras for Reachy equipped with motorised zooms and lenses. The lenses are of different size but it is mostly for an aesthetic reason. Because of the motorised zooms, we can get between 65° to 125° of FOV.
You can take a look at the head’s CAD file if you want to see the different parts.
The cameras can deliver 1080p at 30FPS but because we integrated the streaming in Reachy’s ROS environment, we are currently working with a resolution of 480p at 30FPS and it is still enough to use the robot in teleoperation.
We are currently working on better solutions to handle the camera streaming.
Hi @Simon,
Thanks for your reply - that’s exactly what I wanted to know
I have a vision of making a system with much higher resolution and fps, so the operator would feel like being somewhere else - I know it will be hard to achieve but I have time I was thinking about using ethernet transmission and some mini PC (or PCs) operating and encoding camera stream. I’m most worried about latency, did you measure how much delay there is in your system between camera capture and viewing it to operator?