Here’s a quick update on the covid-19 situation and how it’s impacting Pollen Robotics.
France and the Schengen area are currently in a partial lockdown and because of that, many of our suppliers have stopped their production. Sadly, we’re not able to make more robots in the immediate, and we have reasons to believe that it should be like this for one to two months.
What you can do to support us, is simply help us keep the AI/robotics community alive. As you know, Pollen Robotics is a start-up company that prides itself on designing and building open-source material so it benefits everyone. We’re a dedicated team of 4, and it is because of people like you that we will keep making awesome robots.
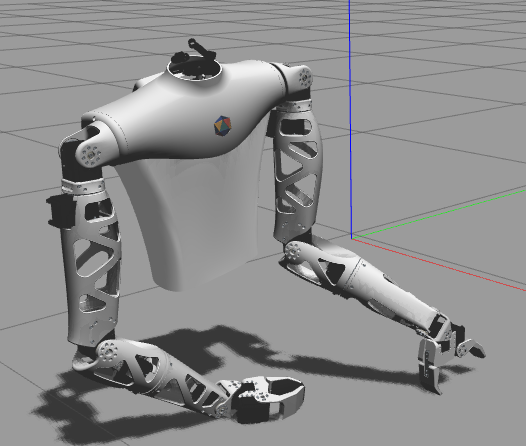
We’ve got something pretty cool we want you to help us create: we’re currently designing a simulator software that will allow our users to test a 3D-visualized Reachy!
Want to be involved in its programming/testing? Just let us know…
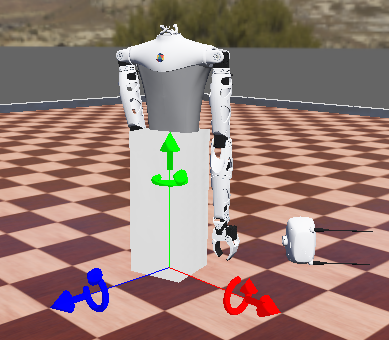
We have the 3D model we “just” need to create a robot structure with parent/children and joints. We would like to do it with Blender so we can provide a nice 3D model to the community for to create animation and 3D rendering, then import the model in Unity for simulation.
I feel there are a lot of benefits to also having a URDF, which the community can use in RVIS and Gazebo for physical simulation, deep reinforcement learning applications. Me and my team at Sentient Bionics can help with this!
Is this available now to anyone? I’d like to simulate some of my tasks at work. Hoping to use reachy as a full body prosthetic, cause my body could carry the virus. Either asymptomatic or otherwise but I am required to take time off based on presumption alone untill I provide negative test results.
Hi, I used the model URDF provided by pollen robotics, but when I convert it to sdf for Gazebo using gz sdf -p reachy.URDF > reachy.sdf the head is missing. Same problem when I want to convert it to webots.
Does someone have fixed the problem ? Or know how to do ?
Sorry for the late answer, we missed your message…
Did you find a solution to this problem?
Orbita is handled in a tricky way in the urdf, we do not know the impact of it.
Let us know if you managed to solve the problem, if not we will have a look!