Hi Ziad,
It is nice to see that you are working on a new control method !
There is a simple way to get the center of mass and the inertia matrix that you need:
-
Follow the links to the the 3D mechanical parts of Reachy that have been shared in this post: 3D CAD models release!
-
When you can see Reachy’s parts in Onshape, you can click on the
 icon on the right side of the toolbar at the bottom of the interface.
icon on the right side of the toolbar at the bottom of the interface. -
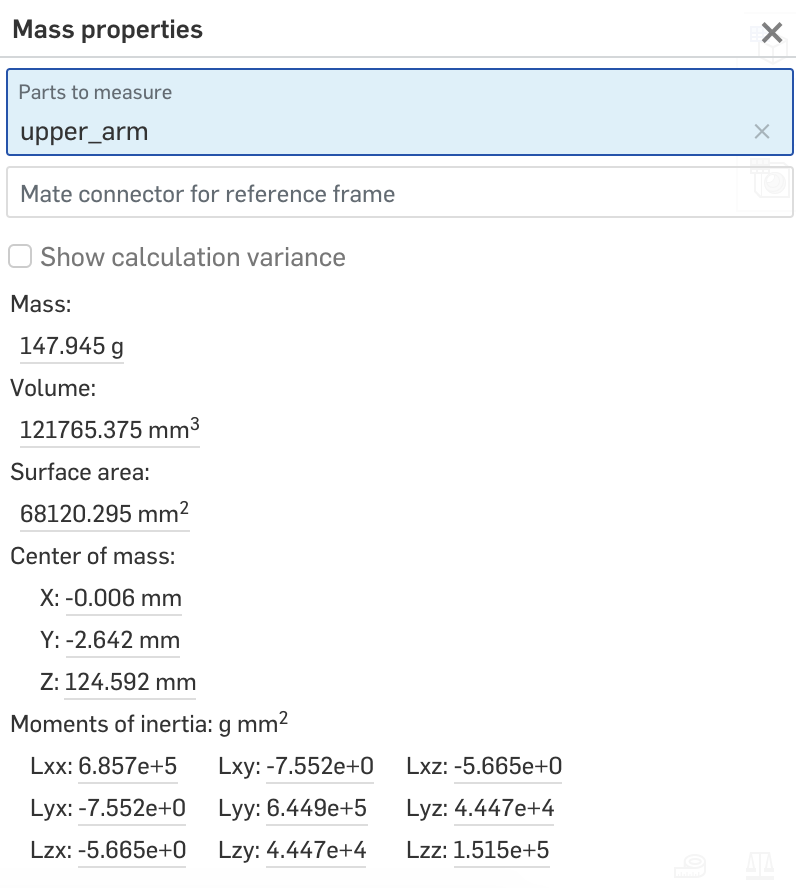
There, you can click on the part that you’re interested in and have access to what you need:
I hope this is clear and will help you!
Augustin.