With the Unity package you have a script called “WsIO.cs”.
You need to create an object in your scene and to attach this script to it.
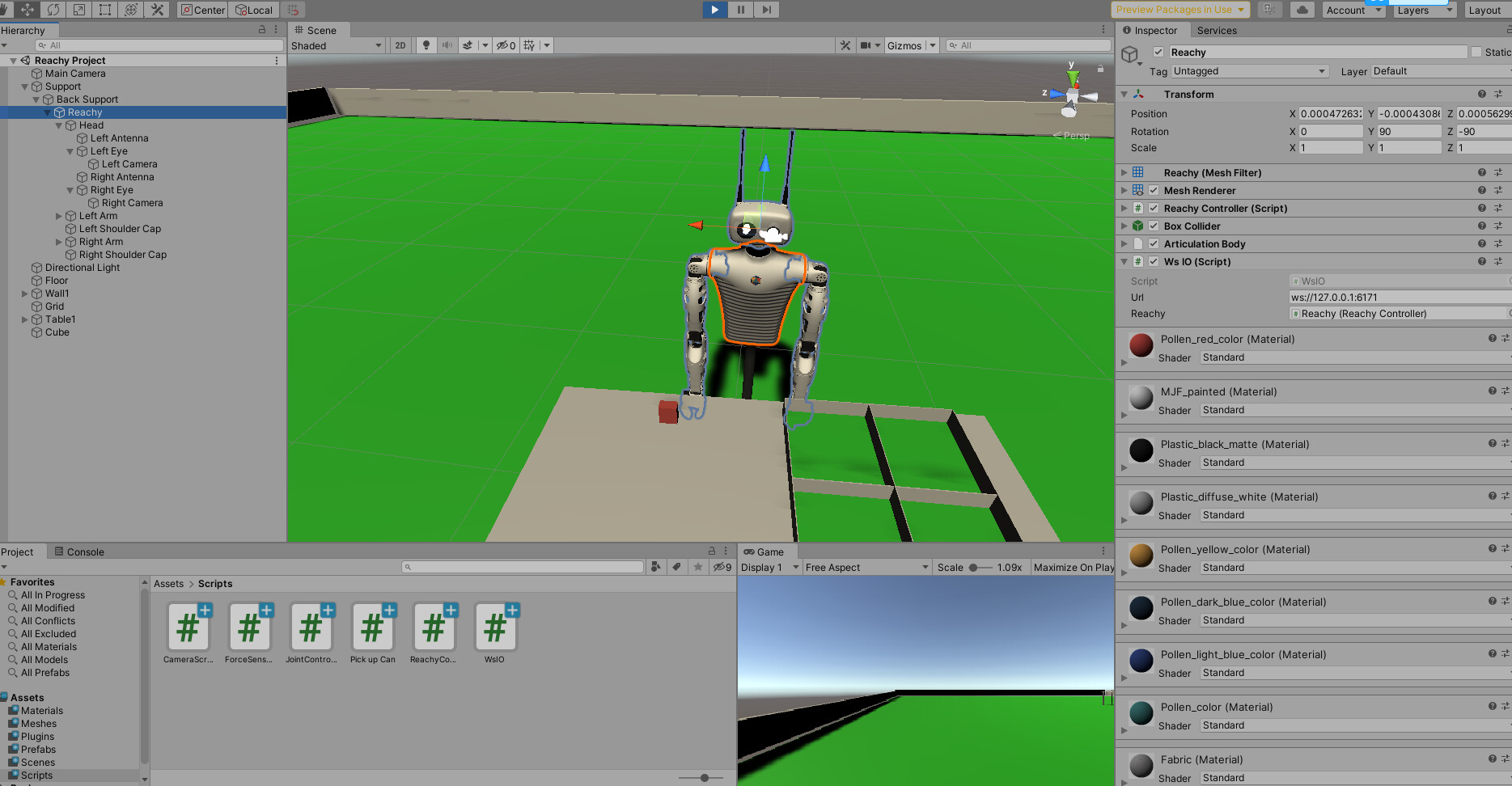
You should then be able to connect to your Unity robot with your Python script using exactly the same code as written in your first post! (Make sure to instantiate your Reachy before clicking “Play” in Unity).
Thank you for your replay.
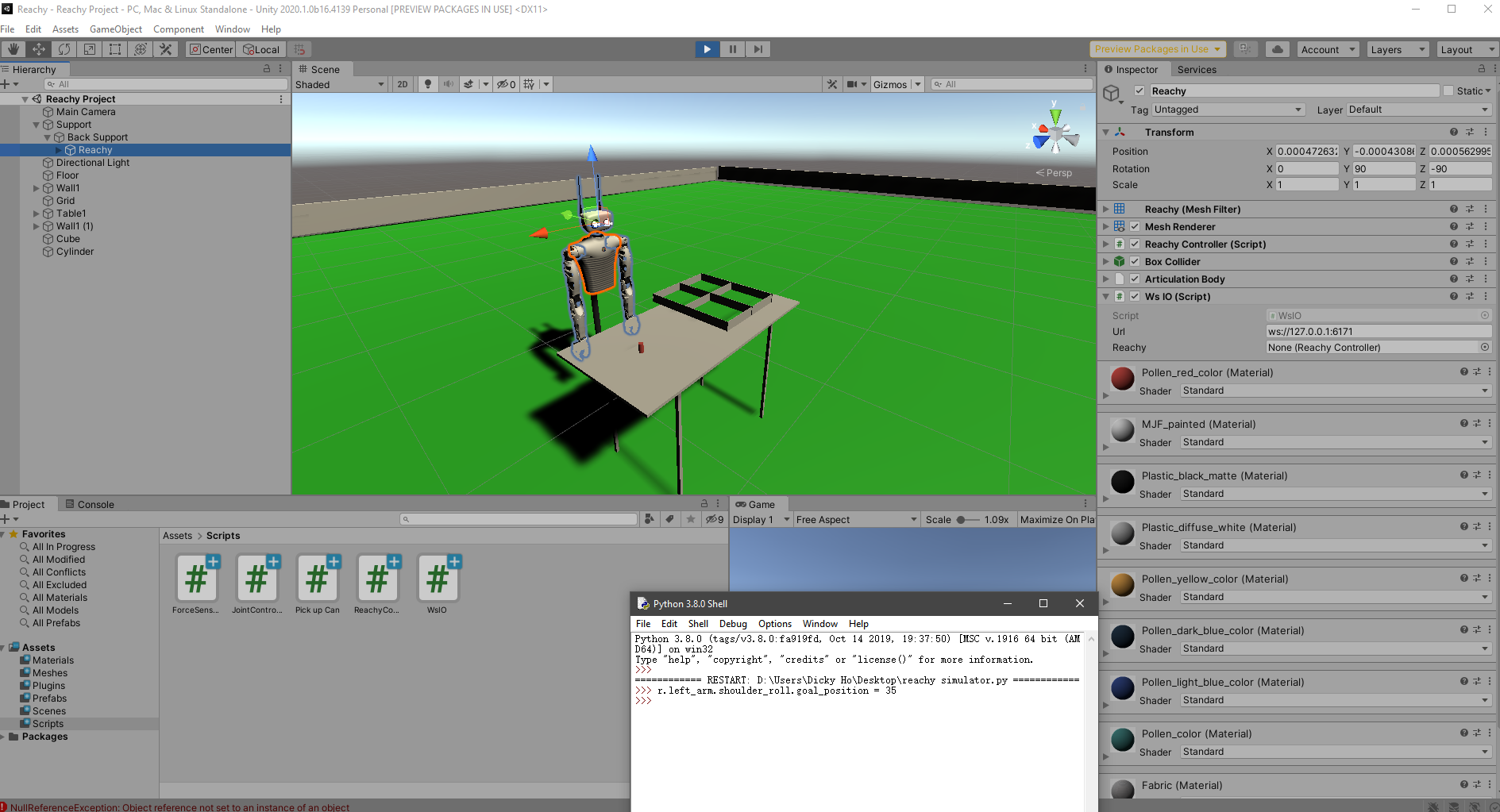
However, can you see if I made any mistake?
I’ve set up the reachy, and implemented WsIO script as you can see from the picture and it is in play, and I type the coding, the reachy does not respond to it.
Is there any extra step that I needed to do?
Best Regards
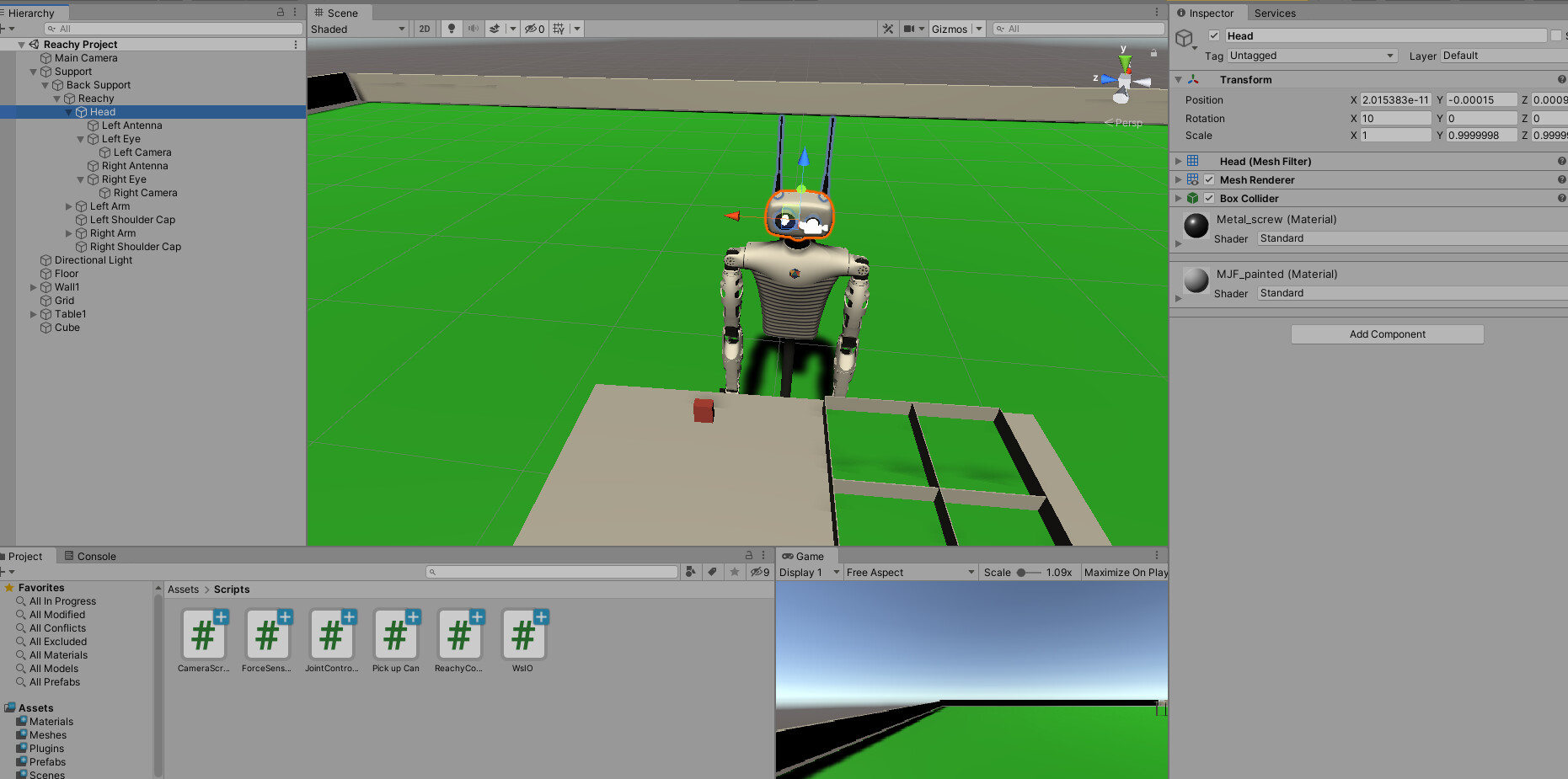
In fact there had been changes in the latest version of reachy for the vision. There is another way to get images from the camera with this version but which is not compatible anymore with the simulation (you will get a black image).
If you want to use Reachy’s view, I advise you come back to a previous release of reachy (version 1.2.3 is fine!), in which you will be able to use r.head.get_image().
For your other question, you just have to declare the head part in your Python script when creating Reachy (as I wrote above in my previous post), and that’s all! You do not have to do anything else
From Unity Hub create a new 3D project. In the project, click Assets/Import package/Custom Package... and import reachy-articulations-unity2020.unitypackage.
Then directly drag and drop Reachy prefab in the hierarchy.



 so please be patient with me.
so please be patient with me.