How do you like my tribute to Reachy?
Dynamixel (AX-18) pan&tilt head with 2 Logitech cameras. He should support and motivate my studies in ROS and OpenCV ![]()
.
How do you like my tribute to Reachy?
Dynamixel (AX-18) pan&tilt head with 2 Logitech cameras. He should support and motivate my studies in ROS and OpenCV ![]()
.
Woa that’s really nice!
What kind of camera are you using?
Thanks Matthieu! I went for 2xLogitech C615. When disassembled, they perfectly fit into your original frame (with my custom eyebulbs for joining)
Mind sharing your modified files and pan tilt setup info? Any changes or updates since?
Hi, sloooow progress due to lack of time. 
What I did is far from being shared… anyway here it is, thanks for asking.
I quickly drew a support for dynamixel ax-18 that fits in the torso with no modifications. But as I’m planning to go for XL-430 I think will drop this design.
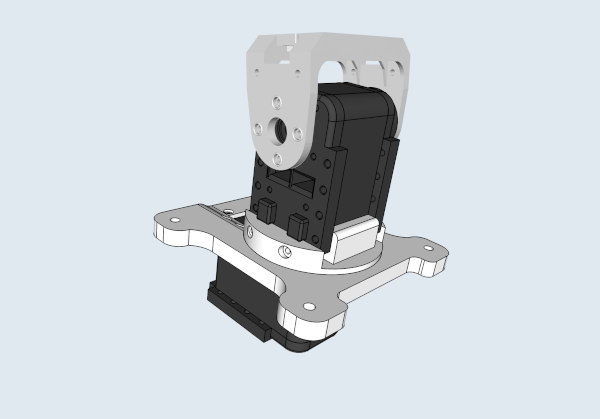
base.stl (822.4 KB) joint.stl (394.6 KB)
Are you using the same motors for the antenna? Or did you find something cheaper?
Hi @AlbertoD,
Currently we’re using this motor which costs 24$ for Reachy’s antennas.
Cheers
I’m using the xl-320 with a LM2596 Step down voltage regulator.
Thanks!, I am starting to build a version of this robot, and i am having doubts on how to control the dynamixel motors, i will use a raspberry pi 3B with ubuntu server as the “brains”, and i have seen a couple of options, like using a USB communication converter (U2D2 - ROBOTIS or DYNAMIXEL Starter Set [INTL] ) or using a small circuit that converts full-duplex into half-duplex like 74LS241, the last one seems more complex.
How do you control the motors?
Hi! I’m actually on a different project, nevertheless I had started to implement the dynamixel control for the robot’s head.
I considered 2 options:
I decided to go for ros_control as I wanted my Reachy to be fully ROS standard. I found a good dynamixel hw interface here GitHub - resibots/dynamixel_control_hw: Hardware interface for ros_control and the Dynamixels actuators
Be prepared to waste some nights on it! 
